I am a Ph.D. candidate in robotics at Northwestern University Center for Robotics and Biosystems, advised by Prof. Todd Murphey. I also collaborate with Dr. Peter Trautman at Honda Research Institute, with whom I developed the algorithm and software for a five-month, large-scale field deployment of robot navigation in human crowds in Santa Cruz, CA.
My research focuses on open-ended robot intelligence—enabling unsupervised, curiosity-driven data collection and learning in unstructured, human-centered environments. My work intersects with algorithmic decision-making, machine learning, human behavioral modeling, and real-world robot deployment. Applications of my work include autonomous exploration, human-robot cooperation, robot manipulation, 3D perception, and soft robot control.
Please check out my CV, Google Scholar, and GitHub.
I’m currently seeking postdoctoral and research scientist opportunities. If my background sounds like a good fit, I’d love to hear from you!
My research focuses on open-ended robot intelligence—enabling unsupervised, curiosity-driven data collection and learning in unstructured, human-centered environments. My work intersects with algorithmic decision-making, machine learning, human behavioral modeling, and real-world robot deployment. Applications of my work include autonomous exploration, human-robot cooperation, robot manipulation, 3D perception, and soft robot control.
Please check out my CV, Google Scholar, and GitHub.
I’m currently seeking postdoctoral and research scientist opportunities. If my background sounds like a good fit, I’d love to hear from you!
Highlights

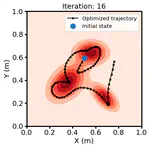
Our paper titled “Flow Matching Ergodic Coverage” got accepted at Robotics: Science and Systems (RSS) 2025! Please check out the project website at https://murpheylab.github.io/lqr-flow-matching/!
Our paper titled “Inverse Mixed Strategy Games with Generative Trajectory Models” got accepted at the IEEE International Conference on Robotics and Automation (ICRA) 2025! Please checkout the project at https://murpheylab.github.io/inverse-mixed-strategy/